Omicontrol
![]()
Page author: Matt Young, vision systems & low-level developer
Omicontrol is Team Omicron’s wireless robot/camera debugging and management application. With the creation of Omicam, we needed a way of visualising camera output, managing the SBC and editing thresholds. In the past, we used the OpenMV IDE, but given that Omicam is entirely custom developed, this meant we also had to custom-develop our own camera application.
In addition, with our new advanced strategies and localisation, as well as the potential auto referee future rule addition, we felt like this year was a good time to add a remote robot management feature in our future app with the ability to reposition, reorient and automatically reset robots on the field wirelessly, as well as visualise their positions.
We added both of these features into Omicontrol, to make it essentially our all-in-one robot management application. Because the application will be used frequently in debugging as well as in the high-pressure mid-game interval, Omicontrol’s primary design goals are to be easy to use and reliable.
Omicontrol is a cross-platform application that works on Windows, Mac and Linux. It’s developed in Kotlin and uses JavaFX for the GUI, via the TornadoFX framework.
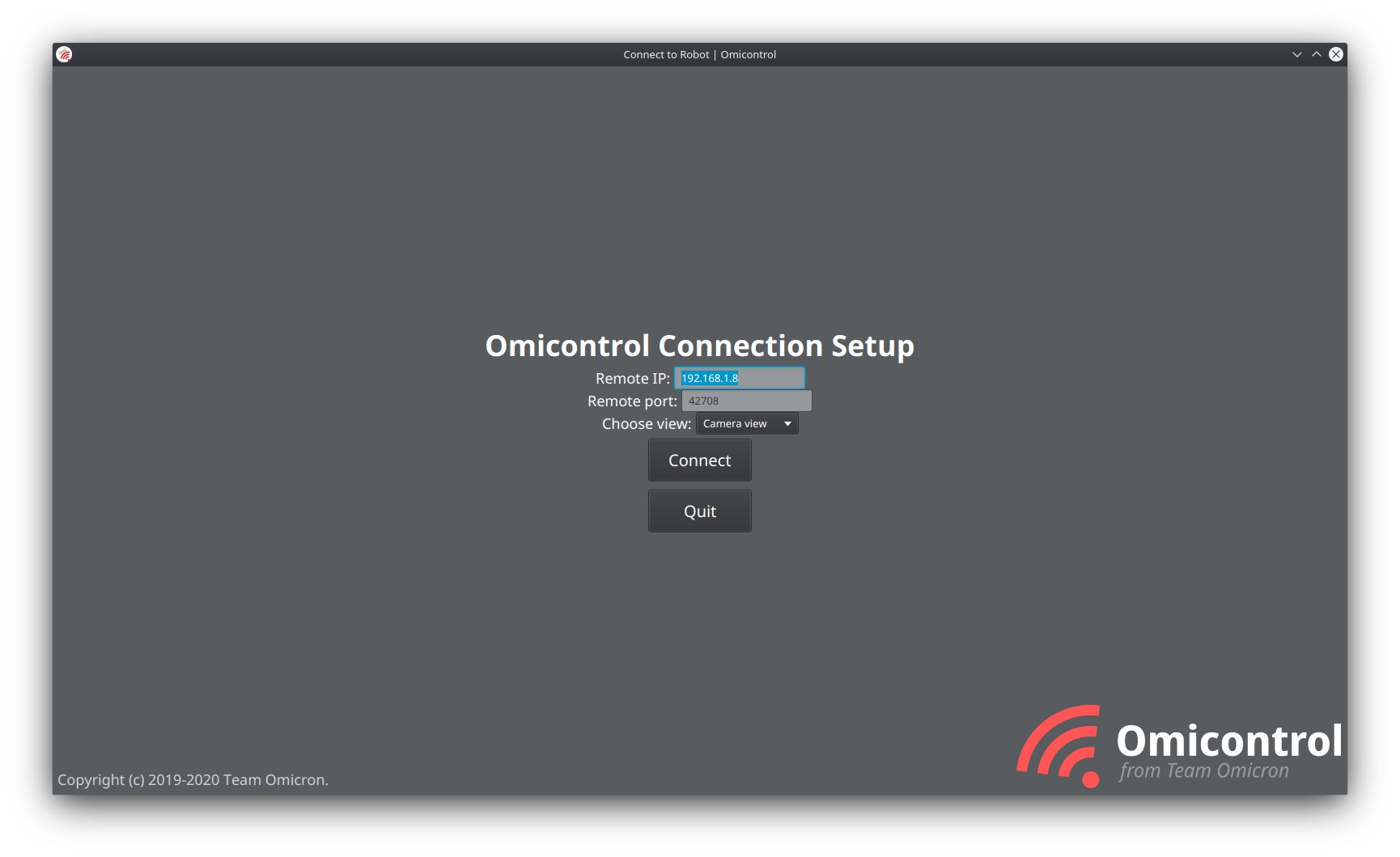
Figure 1: Omicontrol main window running on KDE neon
TODO: VIDEO
Views
Omicontrol functions through the concepts of “views”, which provide different information about different aspects of our robot(s).
Camera view
The Camera View can to view camera output and tune threshold parameters. This view receives a JPEG-compressed 720p video stream from Omicam and can be configured to display both the bounding box and individual pixels selected by the thresholds. The camera view supports the editing and live preview of thresholds for different objects (balls, yellow goal, blue goal, lines). This has greatly sped up development because thresholds can be previewed in realtime instead of having to wait for the app to restart (as was the case in OpenMV).
The camera view supports thresholds specified in RGB, HSV, YUV and LAB colour spaces (although only RGB is sent to the robot). When changing colour spaces, the current threshold values are automatically converted. At the time of writing, this was a little bugged so we mostly just used RGB for thresholding.
Field view
Similar to teams in the major league, we implement a Field View to display the robots’ localised positions and enable control of them. The field view allows us to get a full picture of the robot’s world model (how it sees the world currently), and has been immensely useful in evaluating the performance of the localiser (as well as just being a cool thing to show off!). This view displays a top-down model of the field with the following features:
- sprites for each of our robots’ localised position (drawn to the correct orientation from the IMU as well)
- sprite for the ball’s estimated position
- displays for detected robots and their estimated position
- many debug features for looking at he localisation algorithm and goal detection
- bandwidth display, localisation optimiser performance
- display of each robot’s FSM state
The sidebar also contains a panel for controlling the behaviour of the robots. Due to COVID-19 we didn’t have a working robot as explained in other sections, so this feature wasn’t fully implemented. Although the commands are forwarded from Omicontrol, to Omicam, to the ESP32, the ESP32 currently ignores the command. In a future release, users would be able to click to move robots to a specific position, pause robots, orient them and even have them return to their starting position automatically. This would have proved very useful for testing robot behaviour.
Calibration view
This view is used to calibrate the mirror dewarp model, which translates pixel distances from the centre of the mirror into centimetre distances on the real field. In the past, this was complex and could take upwards of half an hour. We decided this process could be greatly streamlined, so we added the calibration view to Omicontrol.
The general flow of generating a mirror model is this process:
- Lay out a ruler, with clear tape every 5cm
- Start Omicam and Omicontrol, and open the Calibration View
- Click on each of the 5cm strips in order to generate data points
- Select the regression type (exponential or polynomial)
- Click “Calculate model”
- Copy the results into the
mirrorModelfield in Omicam and refresh the config file
This approach streamlines mirror model calculation from being a painstaking 30 minute task, into one which can be done in a few button presses in under 5 minutes.
Model calculation process
Once the user has selected a set of points, and the pixel and corresponding centimetre distances have been determined, we now have an interesting problem to solve. Essentially, we have to interpolate this dataset so that for any pixel distance we have, we can generate a corresponding centimetre distance. Ideally, this interpolation method would be accurate for data points that were not observed in the dataset as well (for example, they’re larger than the largest sampled point distance).
This means there’s two categories of algorithms we can use: curve fitting and polynomial interpolation. Curve fitting, or a regression, performs a mathematical optimisation routine to optimise the coefficients for an actual function. Polynomial interpolation uses a series of polynomials to interpolate between data points. Examples of polynomial interpolation methods include Lagrange polynomials, Newton polynomials and also spline-based methods like cubic splines. The trouble with polynomial interpolation is that it doesn’t generalise to points outside the sampled dataset, whereas a regression does. Because a regression generates coefficients for a mathematical model, in theory, it can extend with some accuracy outside the dataset, whereas polynomial interpolation just interpolates inside the dataset. Because of this, we decided to use a regression to generate our mirror model.
The two models we chose to use for our regression were an N-th order polynomial and an exponential in the form f(x) =
ae^(bx). As both of these models are non-linear, we need to do a non-linear least squares regression to calculate the
coefficients. In the polynomial this is N unknowns, and in the exponential it’s just a and b. Traditionally, we used
to export the data to Excel and have it calculated in there, but we decided instead to implement the regression
ourselves to increase the speed of the mirror calculation process.
To perform our least squares regression, we use the Apache Commons Math library and its AbstractCurveFitter.
This internally uses the
Levenberg-Marquardt algorithm, an improvement over the Gauss-Newton algorithm, to converge on the most optimal values
for the unknown coefficients.
Although Commons Math has a built in PolynomialCurveFitter which can fit a PolynomialFunction, there is no
exponential curve fitter or exponential function provided, so we built our own ExponentialCurveFitter and ExpFunction
with value and gradient vector.
Finally, we also calculate the coefficient of determination (R2 value) to analyse the accuracy of the model.
Commons Math has no built-in way of finding the R2 value from the result of an AbstractCurveFitter
implementation, so instead we implemented it ourselves by calculating the residual sum of squares and total sum of squares
as explained here.
Replay view
Unfortunately, the replay view wasn’t completed in time for release. In a future release, the replay view will be very similar to the field view, except it would allow playing back of recorded Omicam Protobuf replay files (*.omirec). The UI would essentially be the same, just minus the online features like movement control and the addition of a video-player-like scrub bar and play/pause/time warp controls.
Wireless connection
Being able to connect to any robot wirelessly and manage it can be a great quality of life improvement when debugging fast moving robots. There are a variety of wireless protocols in existence such as Bluetooth Classic, Bluetooth LE, Zigbee and others. However, we decided to use TCP/IP over WiFi because it’s easy to setup and reliable, compared to Bluetooth which has issues on many platforms.
To accomplish this, the LattePanda SBC creates a WiFi access point (with no internet connection) that the client computer then connects to, establishing a direct link between the two computers. As shown in Figure 1, the user simply types the local IP to connect and everything else is handled for them.
Due to the nature of TCP/IP, we interestingly also have Omicontrol across the Internet. In this setup, an Internet-connected router hosts the LattePanda device on its network via Ethernet or WiFi. The router must port forward port 42708 which is used for Omicam to Omicontrol communications. Then, the client computer in an entirely different location, even a different country, connects to the Omicam router’s public IP address and can interact with the camera and robots as normal. While this is interesting, nonetheless it’s not used in practice due to lack of security, lack of need and Omicam’s bandwidth and latency being too high (as its designed for high-speed local connections).
Wired connection
Although wireless connection is very flexible, on the LattePanda it unfortunately comes at the cost of a very poor connection quality. Thus, we decided to use gigabit Ethernet as an alternative connection type. This also acts as a backup in case the venue bans WiFi hotspots (as has happened before), or there’s too much signal noise to connect properly.
This works by using a special Ethernet crossover cable and creating a simple network through assigning static IPs. The user can simply connect to the static IP they assigned the SBC. Just like the WiFi setup, this creates an offline connection between the two devices at a very high bandwidth and stability. We experience no connection issues at all over Ethernet (although there are some occasional issues with SSH).
Communication protocol
The backbone of bidrectional Omicam to Omicontrol communication is a simple TCP socket on port 42708, with Omicam as the host and Omicontrol as the client. This works both for wireless and wired connections.
Communication between the two devices makes heavy use of Protocol Buffers, on the Omicam side via nanopb, and on the
Omicontrol end in Kotlin via the official Java API from Google (which also works with Kotlin). One of the benefits of
Protocol Buffers is that both Omicam with nanopb and Omicontrol with the Java API share the exact same Protobuf definition
file (RemoteDebug.proto), they just are the result of different code generators. This means that as long as both the Java
and C code is generated at the same time, they are guaranteed to be compatible with each other.
Internally, Omicontrol creates a thread to manage the
TCP connection in the ConnectionManager class which handles encoding and transmitting Protocol Buffer data over
the socket, as well as detecting errors in the connection. All of the code that awaits a response from the remote runs
in a separate thread to the JavaFX UI thread so that the UI isn’t locked up every time a response is queued.
When a button in Omicontrol is clicked, this thread encodes and transmits a Protocol Buffer message to Omicam and waits for a response asynchronously, notifying the calling thread once one is received.
Design considerations
The Omicontrol UI was designed to look professional, be simple to use, friendly to use as a tablet and work cross-platform.
Since Omicontrol is written in Kotlin using JavaFX (via TornadoFX), the app runs on Windows, Mac and Linux with minimal porting required (mainly for changing display types).